Proyecto dragster solar
Guía didáctica destinada a docentes para la realización de actividades prácticas.
Creado: 3 mayo, 2024 | Actualizado: 21 de mayo, 2025
Autoría:

Introducción
Esta guía, destinada a las y a los docentes de las materias “Sistemas Tecnológicos”, “Procedimientos Técnicos” y “Lenguajes Tecnológicos” de tercer año del Ciclo Básico de la Educación Secundaria Técnica, ofrece un modelo de proyecto concreto para poder llevar a cabo actividades de manera articulada entre los tres espacios curriculares; y sugiere estrategias para que las y los estudiantes asuman un rol activo.
Está acompañada, a su vez, por una guía metodológica general sobre Aprendizaje Basado en Proyectos o Problemas, y una Planificación modélica (ver materiales complementarios).
También tiene como complemento un Kit que ofrece diferentes metodologías y herramientas tecnológicas para tomar como insumo durante la planificación del proyecto.
De acuerdo a las capacidades tanto generales como discretas que se propone que logren las y los estudiantes en el Ciclo Básico de la ETP, se sugieren estas metodologías con el propósito de promover condiciones apropiadas para acompañar procesos de enseñanza que aseguren las mejores trayectorias pedagógicas posibles.
El material “Proyecto dragster solar” incluye actividades resueltas que podrán tomarse como referencia y adecuarse a las necesidades de cada grupo de estudiantes.
Se especifican los materiales necesarios que deben disponerse para propiciar un aprendizaje significativo, con el fin de establecer las condiciones necesarias y propias de cada entorno.
En el aula taller se sugiere incluir en forma continua, para fomentar el hábito y la práctica, la medición de todos los parámetros posibles, como así también la divulgación de los símbolos, las unidades, los múltiplos y submúltiplos de las magnitudes.
Contenidos
Teniendo en cuenta lo compartido en el ANEXO I Ciclo Básico DET1 a lo largo del “Proyecto dragster solar" se tratan, particularmente, los siguientes temas que forman parte de los contenidos del diseño curricular.
Diseño asistido por ordenador (CAD): los saberes digitales comienzan con el diseño del robot en un software de CAD. Aquí se crean los modelos 3D de los componentes, como el chasis, las ruedas, los ejes y los engranajes de reducción. Se utilizan herramientas digitales para asegurar la precisión y la compatibilidad entre las partes.
- Simulación y análisis: antes de la fabricación, se pueden realizar simulaciones digitales para prever el rendimiento del robot en diferentes condiciones, como la velocidad, la resistencia y la eficiencia energética. Esto ayuda a optimizar el diseño y a identificar posibles problemas antes de construir el prototipo físico.
- Fabricación aditiva: el chasis del robot y otros componentes pueden fabricarse utilizando tecnologías de impresión 3D. Los saberes digitales se aplican en la preparación de los archivos digitales para la impresión, así como en la configuración de los parámetros de impresión para garantizar la calidad y la resistencia de las piezas.
- Integración de componentes electrónicos: en la etapa de montaje se integran los componentes electrónicos, como el panel solar, el interruptor, el motor y la batería. Aquí se aplican saberes digitales para el cableado y la conexión de los componentes de manera segura y eficiente.
- Programación y control: para controlar el funcionamiento del robot se puede utilizar un microcontrolador programable, como Arduino. Los saberes digitales se aplican en la programación del microcontrolador para coordinar el funcionamiento de los diferentes componentes, como el motor, el interruptor y el sistema de dirección. Se pueden implementar algoritmos de control para optimizar el rendimiento del robot y maximizar su eficiencia energética.
Sistemas tecnológicos
Contenidos
Diseño y construcción de sistemas tecnológicos.
Sistemas de automatización y control: control y automatización con Arduino. Introducción a la programación de Arduino para el control del semáforo largador.
Operadores mecánicos y mecanismos: diseño de mecanismos avanzados. Aplicación de conocimientos sobre engranajes, sistemas de transmisión, y otros mecanismos avanzados en el diseño del Dragster solar, homologador, semáforo largador y pista.
Procedimientos técnicos
Los recursos materiales: la incorporación de nuevos materiales a fines del Siglo XX y principio del siglo XXI. La expansión de los nuevos materiales. Selección de materiales para aplicaciones específicas. Las herramientas y las máquinas: conocimiento y uso de las máquinas y herramientas automatizadas.
Lenguajes tecnológicos
Los procesos de representación y modelización. Proyecciones axonométricas: caballera, isométrica y manométrica. Representación y exploración gráfica de objetos mediante vistas y secciones normalizadas de una pieza. Herramientas para la planificación de la producción: Diagrama de Gantt. Introducción al Dibujo Asistido: elaboración e interpretación de planos y gráficos mediante software.
Etapas de desarrollo del proyecto
A continuación se presentan una gran variedad de actividades para llevar a cabo los encuentros en forma organizada y culminar en tiempo y forma el proyecto DRAGSTER SOLAR. En esta guía se desarrollarán algunas actividades a modo de ejemplo.
Etapa inicial
Destinada a la comprensión del problema planteado.
Actividad 1
En esta primera actividad se presenta la propuesta y sus distintas etapas, como así también los niveles de logros esperados según rúbricas.
Problemática
Se propone realizar el diseño y la construcción de un vehículo Dragster que utilice energía solar para poder desplazarse. En el caso de que no se cuente con la luminosidad requerida, se podrá utilizar la batería que se encuentra alojada sobre el chasis.
Esta categoría consiste en una carrera de velocidad en línea recta, emulando carreras del tipo Dragster o Cuarto de milla.
Requerimientos
A continuación se detallan los requerimientos necesarios para la fabricación del robot Dragster.
Programación: programación por código utilizando Tinkercad.
Dimensiones: las dimensiones máximas de los mismos serán de 150 x 220 mm.
Peso: no hay restricciones de peso.
Componentes
Motor: utilizar motores del tipo CC de 3V.
Alimentación: energía solar o baterías en el caso que no hubiese adecuada luminosidad.
Transmisión: engranajes - poleas.
Ruedas: libre.
Placa controladora: Arduino - Esp 32.
Sensor: ultrasónico.
Se recomienda el reciclado y la reutilización de componentes (lectoras, impresoras, equipos musicales, DVD).
Etapas del proyecto
A continuación se mencionan las etapas que se llevarán a cabo para el desarrollo del proyecto.

| 1 | 2 | 3 | 4 | 5 |
| Etapa inicial destinada a la comprensión del problema planteado. | Etapa de diseño destinada a trabajos grupales de investigación, de creación y de toma de decisiones. | Etapa para la presentación, discusión e intercambio entre estudiantes de los proyectos diseñados. | Etapa de fabricación del producto/ prototipo. | Etapa para la evaluación del proceso realizado. |
Logros
Se comunica a las y a los estudiantes las pautas de evaluación, en este caso se optó por los criterios que se presentan a continuación.

| Criterio | Aspecto a mejorar | En proceso | Bueno | Sobresaliente |
| Creatividad | Las y los estudiantes dan evidencias insuficientes en los niveles de creatividad esperados. | Las y los estudiantes muestran creatividad y originalidad. No contemplan el uso de elementos reutilizados en el proyecto. | Las y los estudiantes muestran bastante creatividad y originalidad. No detectaron o encontraron componentes para ser reutilizados en el proyecto. | Las y los estudiantes muestran mucha creatividad y originalidad. Tienen la capacidad de reutilizar componentes de productos que ya no tengan vida útil. |
| Diseño | Las y los estudiantes dan evidencias insuficientes en el nivel de cuidado del diseño, la prolijidad y el orden de los componentes. No se puede observar el funcionamiento por estos detalles. | Las y los estudiantes cuidan poco el diseño, la prolijidad y el orden de los componentes. El funcionamiento se ve afectado en gran medida por estos detalles. | Las y los estudiantes cuidan bastante el diseño, la prolijidad y el orden de los componentes. Algunos funcionamientos se ven afectados por detalles. | Las y los estudiantes cuidan muy bien el diseño, la prolijidad y el orden de los componentes. Estas características favorecen el funcionamiento de la maqueta. |
| Comunicación | Las y los estudiantes no muestran preparación y organización en absoluto para la presentación. | Las y los estudiantes muestran poca preparación y organización durante la presentación. | Las y los estudiantes muestran preparación y organización durante la mayor parte de la presentación. | Las y los estudiantes muestran mucha preparación y organización durante toda la presentación. |
Actividad 2
A continuación se identifican factores esenciales a través del “Método 5W + 1H”.
Con esta metodología, las y los estudiantes generan preguntas para responder de manera amplia en función de la problemática, con el propósito de generar ideas que podrían contribuir a la resolución de un problema.
Estas preguntas actúan como punto de partida en el desarrollo del proyecto y generan un espacio de debate y análisis entre docentes y estudiantes.
¿Qué? What
- ¿Qué propuestas consideran pertinentes para abordar la problemática?
- ¿Mediante qué mecanismos podría funcionar nuestro robot Dragster?
- ¿Qué son las magnitudes eléctricas?
- ¿Qué es un Tester?
- ¿Qué materiales reciclados se podrían utilizar para producir un prototipo al reto planteado?
- ¿Qué componentes necesitaría?
- ¿Qué diseño mejoraría el funcionamiento del prototipo?
- ¿Qué peso sería el indicado?
- ¿Qué diámetro deberían tener las ruedas?
- ¿Qué tipo de relación?
- ¿Qué relación peso potencia permitirá el mejor desempeño?
- ¿ Qué sensor da la posibilidad de saber la distancia a un obstáculo?
¿Dónde? Where
- ¿Dónde va a posicionarse el peso?
- ¿Dónde resulta conveniente conseguir los insumos?
- ¿Dónde se aplican masivamente estos mecanismos?
- ¿Dónde se colocará el panel?
- ¿Dónde se posicionarán los ejes?
- ¿Dónde se aplica en la actualidad este tipo de energías renovables?
- ¿Dónde se posicionará el sensor ultrasónico?
¿Cuándo? When
- ¿Cuándo es necesario que esté finalizado el proyecto?
- ¿Cuándo se podrá iniciar la fabricación?
- ¿Cuándo se podría realizar el test al prototipo que permitirá una retroalimentación?
- ¿Cuándo deberá frenar el robot?
¿Quién? Who
- ¿Quiénes deben fabricar el proyecto?
- ¿Quiénes deben generar la documentación técnica?
- ¿Quién ayudará a las y los estudiantes a llevar a cabo el proyecto?
- ¿Quién validará el prototipo?
¿Por qué? Why
- ¿Por qué el uso de material reciclado?
- ¿Por qué es necesaria la fabricación del proyecto?
- ¿Por qué optaron por estos tipos de mecanismos?
- ¿Por qué es un condicionamiento el peso total del robot?
¿Cómo? How
- ¿Cómo funciona un mecanismo de poleas?
- ¿Cómo se realiza la conexión de un motor?
- ¿Cómo se realiza una conexión de pilas en serie?
- ¿Cómo se podrían programar las tareas?
- ¿Cómo se va a fabricar la estructura?
- ¿Cómo se va a fabricar la pista?
Actividad 3
En esta actividad la o el docente organiza a las y a los estudiantes en equipos de trabajo, “Conformación de equipos colaborativos”, en pos de favorecer el aprendizaje individual y colectivo. Esto les permitirá construir su propio conocimiento.
Actividad 4
Es el momento de organizar y planificar tareas por equipo mediante la “Metodología Kanban”.
En una hoja A4 y utilizando post-it2, ir cargando clase a clase las tareas a desarrollar en la columna de pendientes. Una vez que se encuentran en proceso moverlas a la columna indicada. Cuando se concluyen derivar a terminadas.

Etapa de diseño
Destinada a trabajos grupales de investigación.
Actividad 5
Trabajo grupal de investigación con el objeto de conocer posibles alternativas o propuestas a las problemáticas planteadas. La búsqueda de información se puede realizar mediante catálogos, manuales técnicos, folletos o internet.















Imágenes archivo DGCyE.
Actividad 6
Se buscan imágenes de un producto o un componente para observar en ellas diferentes características. Las imágenes se disponen sobre una hoja, lámina o panel y se confecciona una “nube de imágenes”.
No importa el orden ya que en esta instancia se comienzan a reconocer las partes del producto, los materiales, las terminaciones, las formas de los componentes, etc.
El tamaño de las imágenes debe ser el apropiado para apreciar los detalles que se quieran analizar.










Imágenes tomadas de Wikimedia Commons.
Actividad 7
Como parte de esta actividad, las y los estudiantes aportarán ideas sin orden ni filtro, mediante la técnica de lluvia de ideas. Inicialmente, éstas se recogen sin evaluación y, luego, se valoran. La base de esta técnica consiste en desencadenar una “lluvia de ideas” (brainstorming) y plasmarlas en papel para que todas y todos realicen, en una segunda instancia, una puesta en común que permita identificar posibles soluciones para la problemática asignada.




Imágenes archivo DGCyE.
Actividad 8
Bocetado a mano alzada. Luego de realizar la lluvia de ideas, las y los estudiantes bocetan varias propuestas para seleccionar, posteriormente, la más apropiada.
Para el desarrollo de la actividad se sugiere consultar la guía Proyecciones axonométricas, disponible en el portal Continuemos Estudiando.
Propuesta 1 | Robot Dragster

Propuesta 2 | Robot Dragster

Propuesta 3 | Robot Dragster

Imágenes archivo DGCyE.
Actividad 9
Cuadro de virtudes y defectos. Se utiliza para ordenar virtudes y defectos que se encuentran en las tres propuestas bocetadas en la actividad 8, con el propósito de seleccionar una en función de las necesidades planteadas.
| DRAGSTER SOLAR | ||
| PROPUESTAS | VIRTUDES | DEFECTOS |
| 1 | La estructura de madera se puede trabajar muy fácilmente. El diseño se puede personalizar. Distribución del peso. Fácil ensamble. Resistente a golpes. | Las ruedas y la estructura utilizadas aportan peso excesivo al vehículo. Relación entre engranajes. Diseño sin aerodinámica. |
| 2 | Fácil ensamble de componentes. Estructura simple. Poca cantidad de piezas. Tracción trasera. Su estructura de madera es resistente a fuertes golpes. Adherencia de las ruedas. | Las ruedas utilizadas aportan peso excesivo al vehículo. La transmisión utilizada no genera gran velocidad. Posición del interruptor. El panel solar no posee regulación de posición. |
| 3 | Relación peso-potencia. Estructura del chasis impresa en 3D, posee vaciados para reducir peso. Panel solar con posibilidad de regular ángulo de inclinación de posición. Transmisión por engranajes y poleas. Adherencia de las ruedas. Distribución del peso. Dimensiones de las ruedas. Fácil ensamble. | Su estructura no es resistente a fuertes golpes. La altura genera inestabilidad. |
Actividad 10
Realización de lista de materiales. Se valora el proceso creativo para analizar e identificar componentes reutilizables de productos que ya cumplieron su vida útil. Por ejemplo, la cremallera de una impresora o lectora de CD.





| N° | Designación/Nombre | Función | Características técnicas | Adquisición |
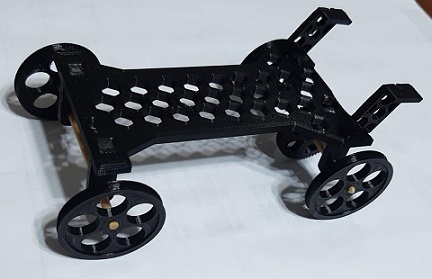
| 1 | Chasis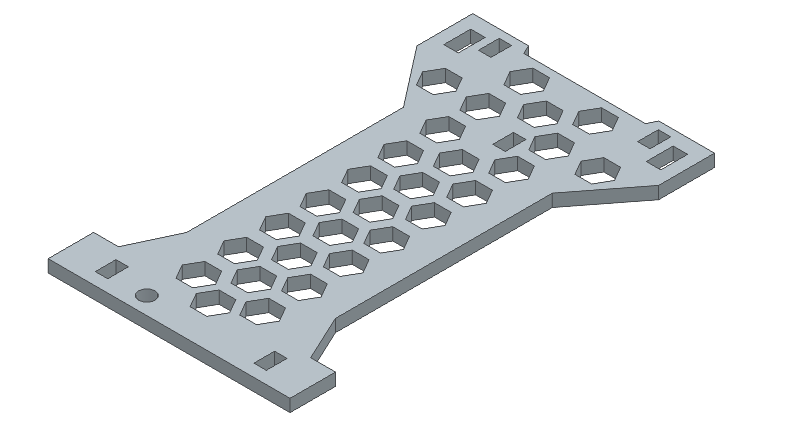 | El chasis de un robot dragster solar es una parte integral de su diseño, ya que afecta directamente al rendimiento, la estabilidad. Soporte estructural El chasis proporciona un marco estructural para sostener y mantener en su lugar todos los componentes del robot. Cuenta con una trama de vaciados que aliviana el peso del mismo. | Material Plástico (PLA, PET, ABS) Espesor: 3 mm | Fabricación mediante impresora 3D. |
| 2 | Soportes panel solar 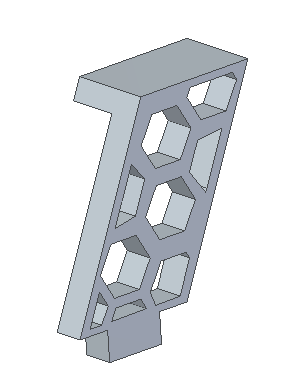 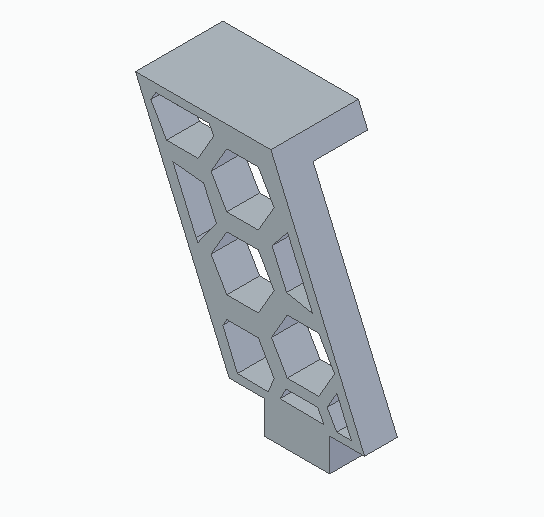 | Se utilizan para sostener el panel solar, el cual se coloca sobre la pestaña superior. En la parte inferior cuenta con un anclaje que se vincula al chasis.Cuenta con una trama de vaciados que aliviana el peso del mismo. | Material Plástico (PLA, PET, ABS) Espesor: 3 mm | Fabricación mediante impresora 3D. |
| 3 | Soportes ejes | Se utilizan para sostener ejes de ruedas y de transmisión. En la parte inferior cuenta con un anclaje que se vincula al chasis. | Material Plástico (PLA, PET, ABS) Espesor: 3 mm | Fabricación mediante impresora 3D. |
| 4 | Panel Solar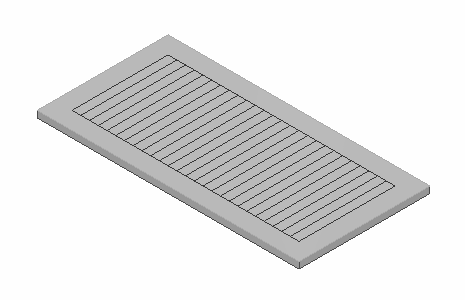 | Este panel solar cuenta con una alta tasa de conversión y rendimiento. Su función es la de convertir la energía del sol en energía eléctrica. | Potencia: 0,18 W Voltaje: 5 V Material: silicio monocristalino Dimensiones: 60 x 30 mm | Casas de electrónica. Tiendas de venta on line. Reciclado. |
| 3 | Motor DVD-CD 3V CC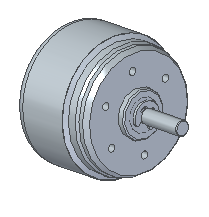 | Motor de CC con voltaje de funcionamiento de 3V producido para diferentes proyectos. En general se utiliza para usar en CD-ROM y DVD. Su función en el robot es la de transmitir el movimiento al sistema de poleas. | Diámetro del motor: 28 mm Altura del motor (sin eje): 12,5 mm Longitud del eje: 10 mm Diámetro del eje: 2mm Velocidad de trabajo: 4000 rpm | Casas de electrónica. Tiendas de venta on line. Reciclado: lectoras de CD- DVD. Electrodomésticos |
| 4 | Cable unipolar | Se utiliza para la transmisión y la distribución de la energía eléctrica. | Cable unipolar Sección: 1 x 0,5 mm Material de la cubierta: PVC Materiales del conductor: cobre | Tiendas de venta on line. Ferreterías. Casas de electricidad. |
| 5 | Llanta 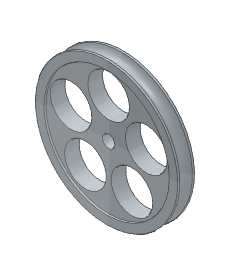 | Se utiliza para que el robot pueda desplazarse. Su diseño permite que la misma genere poco rozamiento. | Diámetro ext: 28 mm Espesor: 4 mm Plástico (PLA, PET, ABS) | Fabricación mediante impresora 3D. |
| 6 | Oring rueda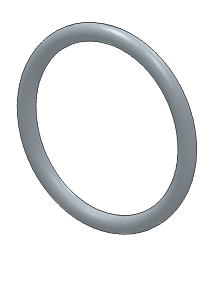 | Se utiliza para que las ruedas del robot puedan desplazarse con mayor adherencia al piso. Se coloca en la ranura que posee la llanta. | Código: AG51 Diámetro ext: 31,88 mm Espesor: 2,62 mm Material: Silicona | Casas de repuestos de automotores, ferreterías. Tienda on line. |
| 7 | Eje diámetro 3 mm  | Se utiliza para vincular las ruedas y las poleas del robot drugster. | Madera Diámetro 3 mm | Ferreterías, carpinterías, librerías técnicas. |
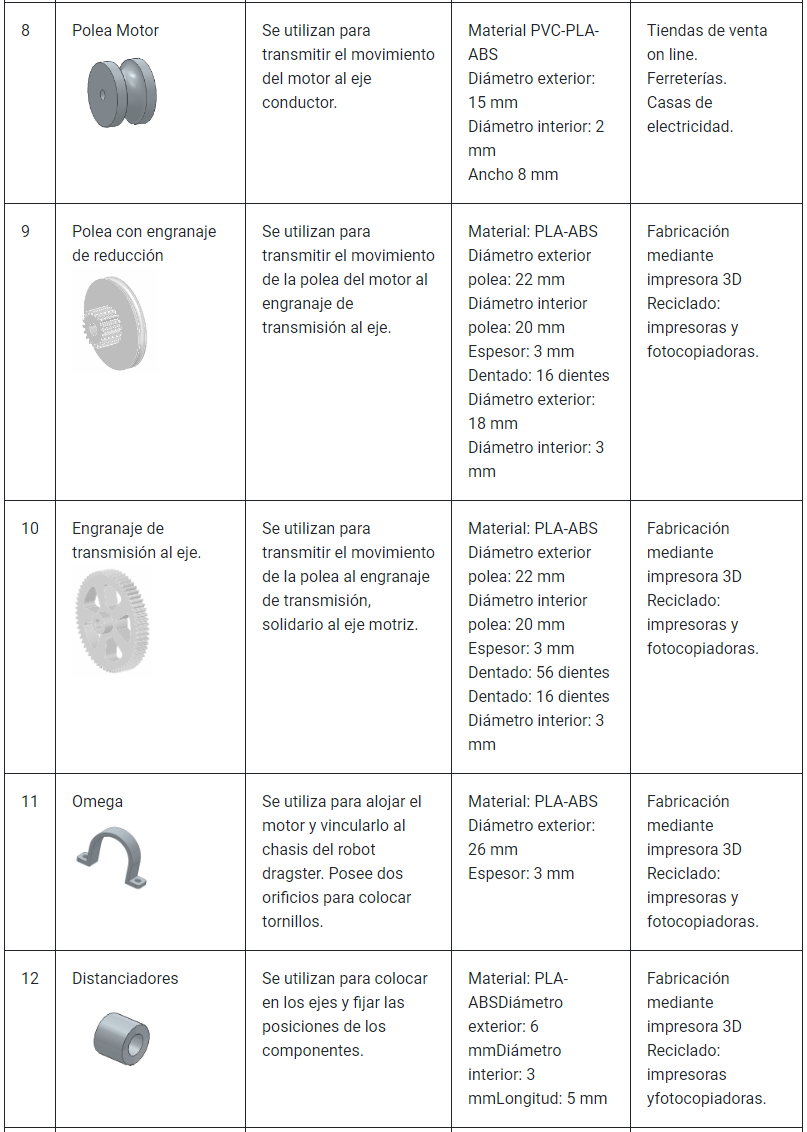
| 8 | Polea Motor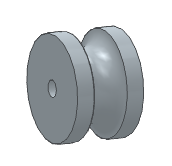 | Se utilizan para transmitir el movimiento del motor al eje conductor. | Material PVC-PLA-ABS Diámetro exterior: 15 mm Diámetro interior: 2 mm Ancho 8 mm | Tiendas de venta on line. Ferreterías. Casas de electricidad. |
| 9 | Polea con engranaje de reducción 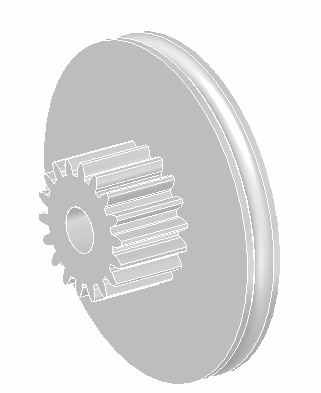 | Se utilizan para transmitir el movimiento de la polea del motor al engranaje de transmisión al eje. | Material: PLA-ABS Diámetro exterior polea: 22 mm Diámetro interior polea: 20 mm Espesor: 3 mm Dentado: 16 dientes Diámetro exterior: 18 mm Diámetro interior: 3 mm | Fabricación mediante impresora 3D Reciclado: impresoras y fotocopiadoras. |
| 10 | Engranaje de transmisión al eje.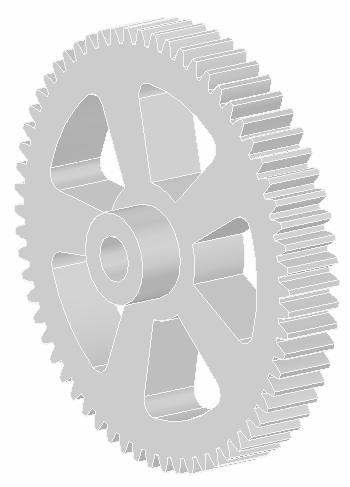 | Se utilizan para transmitir el movimiento de la polea al engranaje de transmisión, solidario al eje motriz. | Material: PLA-ABS Diámetro exterior polea: 22 mm Diámetro interior polea: 20 mm Espesor: 3 mm Dentado: 56 dientes Dentado: 16 dientes Diámetro interior: 3 mm | Fabricación mediante impresora 3D Reciclado: impresoras y fotocopiadoras. |
| 11 | Omega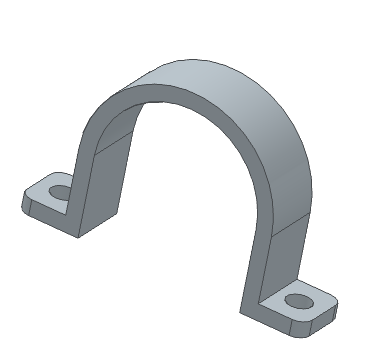 | Se utiliza para alojar el motor y vincularlo al chasis del robot dragster. Posee dos orificios para colocar tornillos. | Material: PLA-ABS Diámetro exterior: 26 mm Espesor: 3 mm | Fabricación mediante impresora 3D Reciclado: impresoras y fotocopiadoras. |
| 12 | Distanciadores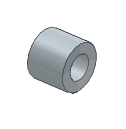 | Se utilizan para colocar en los ejes y fijar las posiciones de los componentes. | Material: PLA-ABSDiámetro exterior: 6 mmDiámetro interior: 3 mmLongitud: 5 mm | Fabricación mediante impresora 3D Reciclado: impresoras yfotocopiadoras. |
| 13 | Correa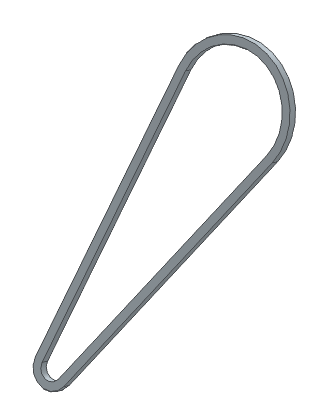 | Se utilizan para transmitir el movimiento del motor al eje conductor. | Material caucho sección plana 3 mm Largo 120 mm | Tiendas de venta on line. Ferreterías. Casas de electricidad. |
| 14 | Baterías: Celda 18650 3.7v Li-ion recargable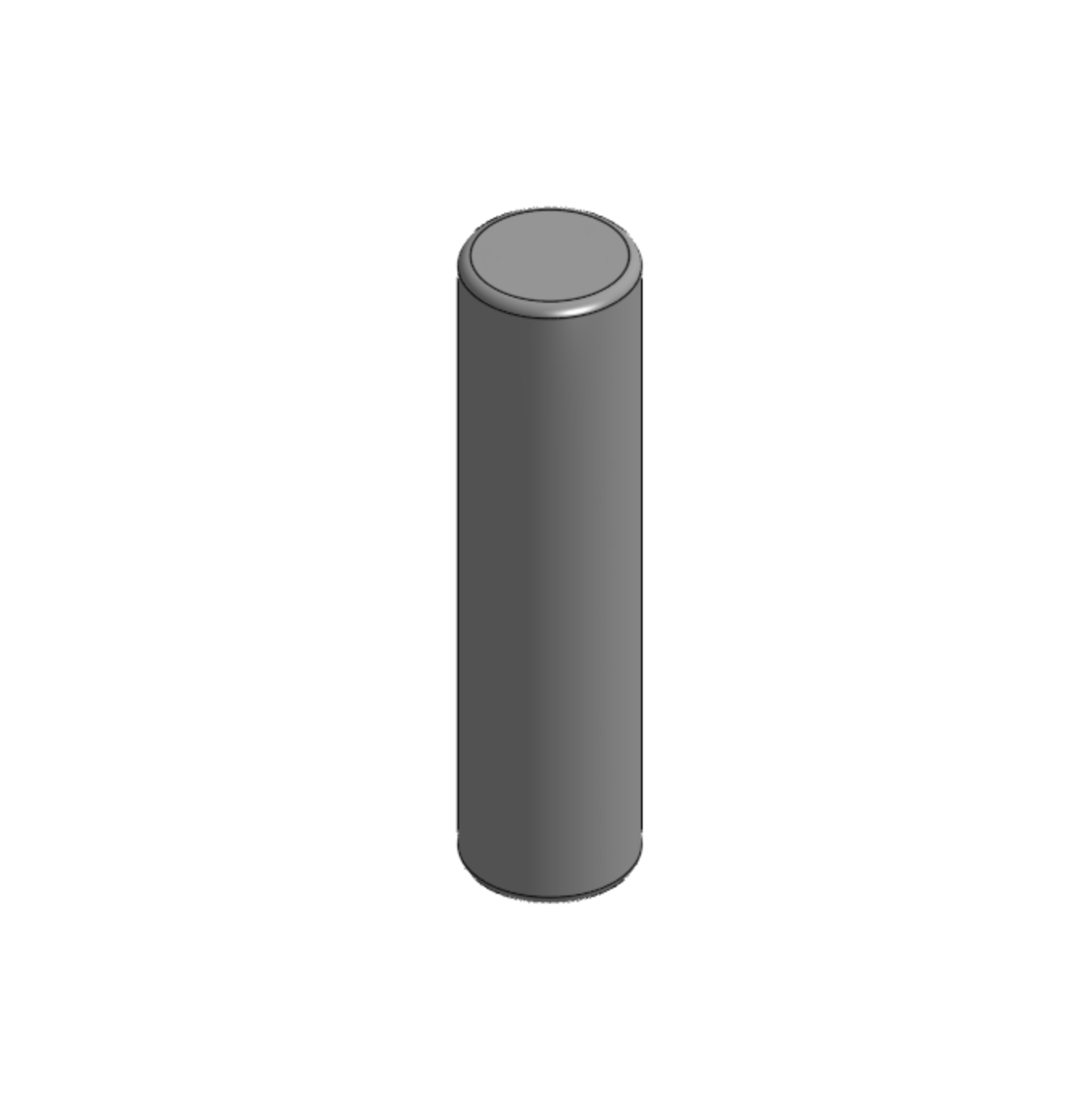 | La batería es un acumulador y proporciona la energía eléctrica. Generalmente, cuando se elije una batería se observan principalmente tres características: capacidad, voltaje y espacio. | Pila/batería Celda 18650 Capacidad de la batería: 2500 mAh Voltaje nominal: 3.7V - Recargable Composición: Ion Litio | Tiendas de venta on line. Ferreterías. Casas de electricidad. |
| 15 | Portapilas /baterías -18650-s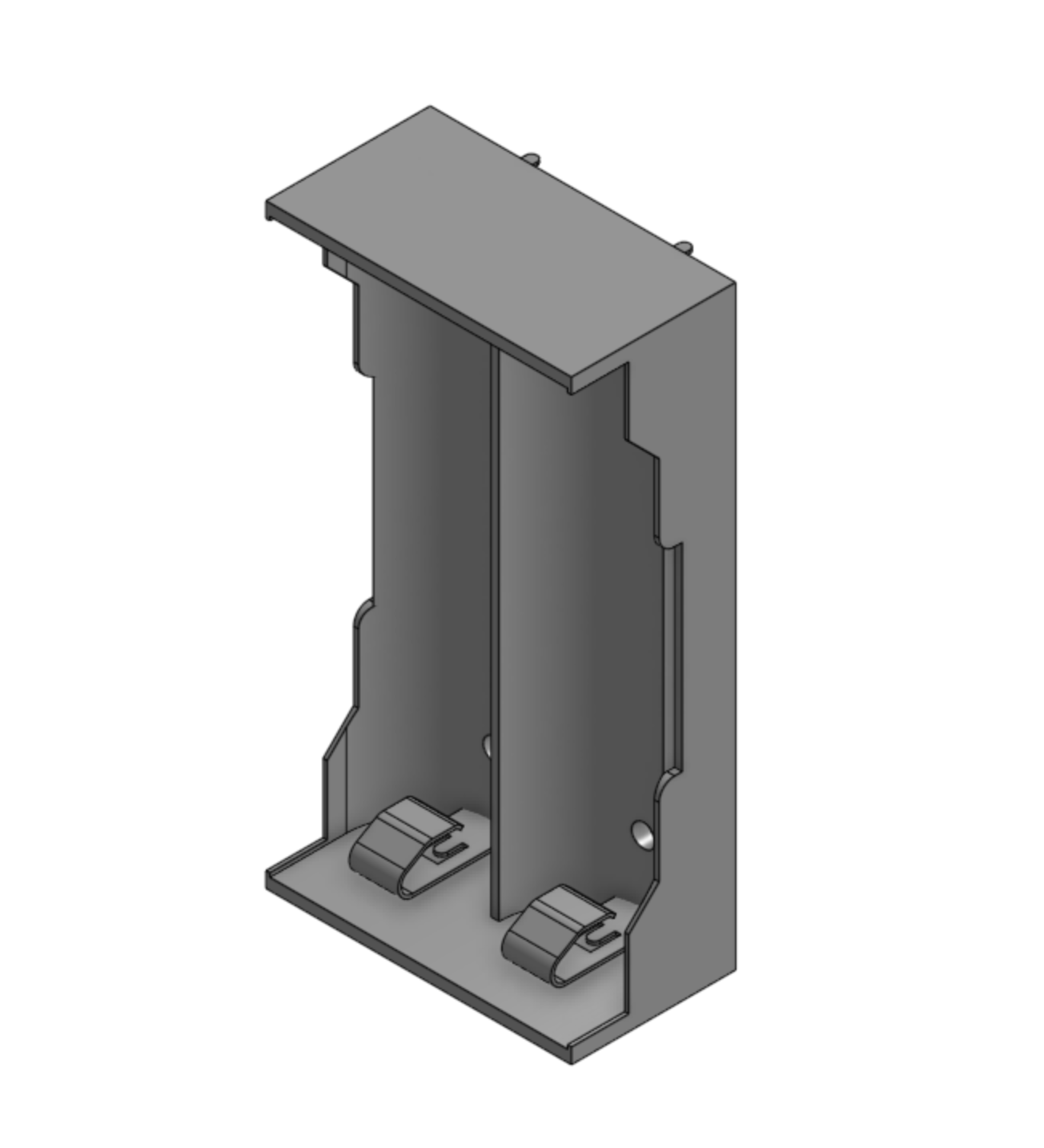 | Compartimento que se utiliza para alojar una o más baterías en un equipo de forma segura. El soporte tiene contactos planos de metal o resortes que presionan contra los terminales de la batería y provocan un contacto eléctrico. | Voltaje de funcionamiento: 3.7V Voltaje mínimo de entrada recomendado - Voltaje máximo de entrada recomendado: 3.7V - 3.7V Voltaje mínimo de entrada límite - Voltaje máximo de entrada límite: 3.7V - 3.7V | Tiendas de venta on line. Ferreterías. Casas de electricidad-Electrónica. |
| 16 | Interruptor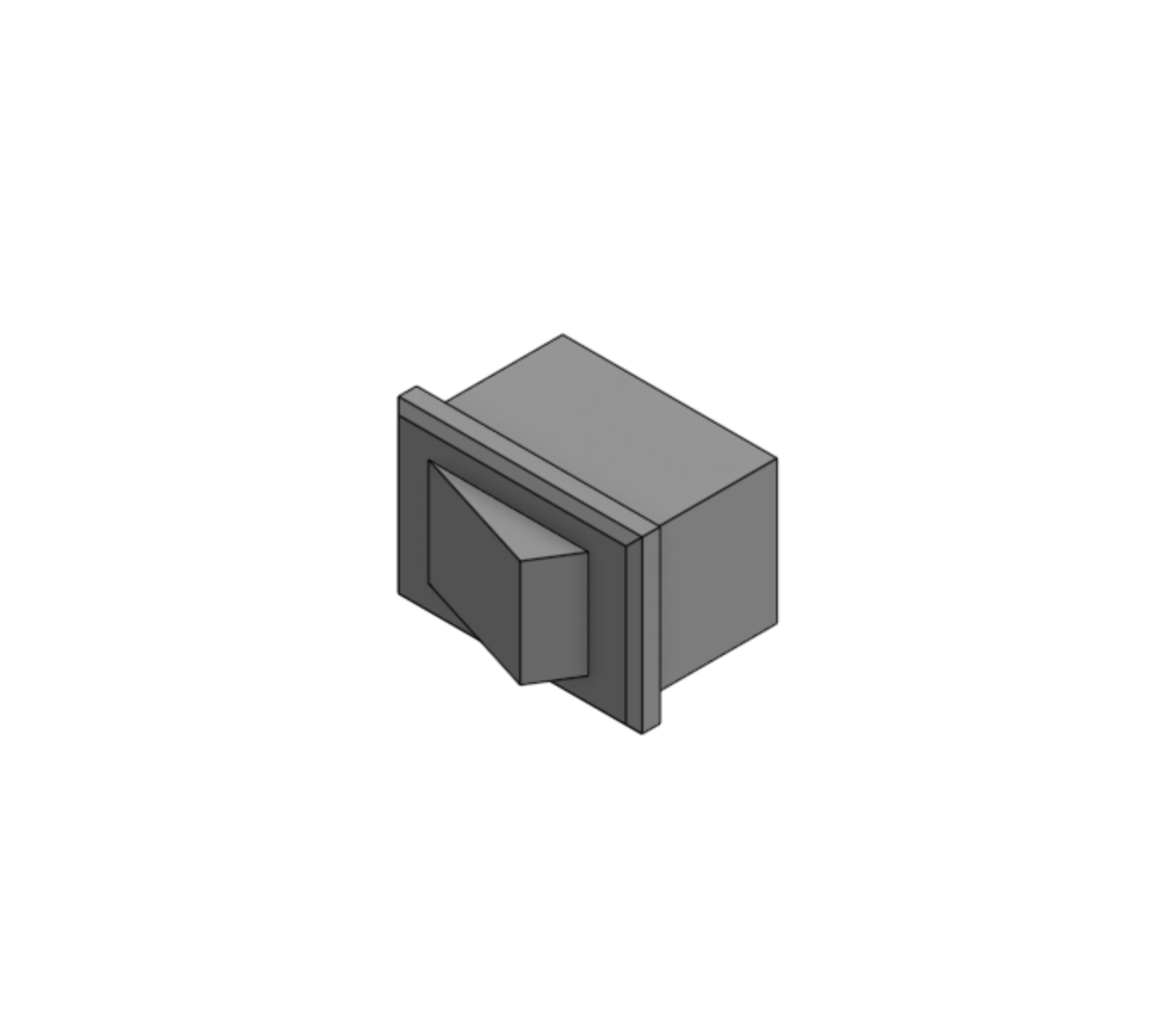 | Dispositivo que permite abrir y cerrar el paso de corriente eléctrica. Elemento fundamental de un circuito eléctrico ya que permite pasar o no la corriente mediante un sencillo funcionamiento. | Llave palanca Switch on/off 2 patas 250v10A | Tiendas de venta on line. Ferreterías. Casas de electricidad. |
| 17 | Led | Un led es un diodo emisor de luz, es decir, un tipo particular de diodo que emite luz al ser atravesado por una corriente eléctrica. Los diodos (emisor de luz, o no) son unos de los dispositivos electrónicos fundamentales. | Sólo dejan pasar la corriente en un sentido. Por tanto, tenemos que conectar correctamente la tensión al dispositivo. - La patilla más larga es la positiva. - La patilla más corta es la negativa. | Tiendas de venta on line. Ferreterías. Casas de electricidad-Electrónica. |
| 18 | Resistencias | Una resistencia es un elemento eléctrico que posee dos polos o bornes que permiten insertarla en un circuito con el objetivo de ofrecer cierta oposición al paso de la corriente eléctrica. Una resistencia es además un dipolo simétrico y lineal. | Valores: - 1 k - 4.7 k - 10 k - 47 k - 100 k | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 19 | Soporte para sensor ultrasónico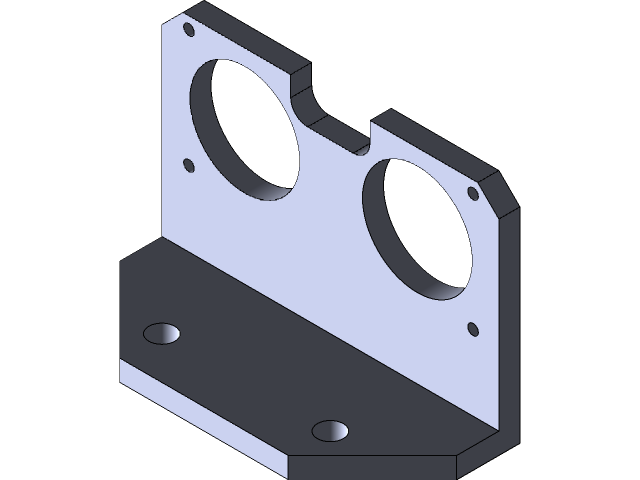 | La función del soporte es la de alojar el sensor ultrasónico. Se descarga desde la plataforma Tinkercad. | Material PLA-ABS | Impresión 3D. |
| 20 | Puente H | El módulo puente H L298 es una tarjeta para el control de motores de corriente directa, motores a pasos, solenoides y en general cualquier otra carga inductiva. | Microcontrolador: ARDUINO Voltaje de funcionamiento: 5 a 35V Voltaje mínimo de entrada recomendado - Voltaje máximo de entrada recomendado: 5V - 12V | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 21 | Sensor ultrasónicoHC-SR04 | Los sensores ultrasónicos emiten ondas sonoras de alta frecuencia y miden el tiempo que tarda en recibir el eco de esas ondas después de rebotar en un objeto. Esta medición se utiliza comúnmente para determinar la distancia entre el sensor y el objeto. | -Voltaje de alimentación: 5V DC - Corriente en reposo: <2mA - Ángulo de cobertura: <15° - Rango de distancia: 2cm – 500 cm - Resolución: 0.3 cm - Frecuencia ultrasónica: 40kHz | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 22 | Arduino Nano  | El Arduino es una placa basada en un microcontrolador ATMEL. Permite programar instrucciones con el Arduino IDE para interactuar con sus circuitos. Tiene una interfaz de entrada para conectar periféricos, cuyos datos son procesados por el microcontrolador. | Microcontrolador: ATMega328P. Velocidad de reloj: 16 MHz. Voltaje de trabajo: 5V. Voltaje de entrada: 7,5 a 12 voltios. Pinout: 14 pines digitales (6 PWM) y 8 pines analógicos. 1 puerto serie por hardware. Memoria: 32KB Flash (2KB para bootloader), 2KB RAM y 1KB Eeprom | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
Actividad 11
Desarrollo de croquis aplicando técnicas de rebatimiento y acotación para poder comunicar el proceso productivo de cada pieza o componente.




Chasis Dragster. Imágenes archivo DGCyE.


Soporte trasero derecho. Imágenes archivo DGCyE.


Soporte trasero izquierdo. Imágenes archivo DGCyE.


Soporte ejes. Imágenes archivo DGCyE.


Polea. Imágenes archivo DGCyE.


Panel solar. Imágenes archivo DGCyE.


Omega. Imágenes archivo DGCyE.


LLanta. Imágenes archivo DGCyE.

Eje rueda. Imagen archivo DGCyE.



Corona. Imágenes archivo DGCyE.

Despiece. Imagen archivo DGCyE.
Actividad 12
En la siguiente actividad las y los estudiantes deberán realizar los planos correspondientes al conexionado de panel solar, batería, switch y motor. A continuación se presentan los circuitos eléctricos correspondientes al proyecto en formato papel y digital.
Circuito eléctrico de conexionado de panel solar, batería, switch y motor
Este circuito posibilitará seleccionar la energía que alimentará el motor para que el vehículo dragster pueda desplazarse. En el caso de que no se cuente con la luminosidad requerida por el panel solar, se podrá utilizar la batería.

Circuito eléctrico Dragster híbrido (Solar -Bateria) con 2 interruptores. Imagen archivo DGCyE.
Circuito eléctrico de conexión de panel solar y motor utilizando el software Tinkercad
Se seleccionan los componentes, la celda solar y el motor de CC; luego se realiza el cableado, respetando los colores que indican su polaridad.

Ahora se puede iniciar la simulación, el motor de cc mostrará sus revoluciones a la izquierda a la izquierda del piñón.

Tinkercad - Circuito dragster solar. Imagen archivo DGCyE.
Circuito eléctrico de conexión de panel solar, batería y motor utilizando el software Tinkercad
Se seleccionan los componentes, la celda solar, la batería, los interruptores y el motor de CC; luego se realiza el cableado, respetando los colores que indican la polaridad su polaridad.

Circuito eléctrico Dragster híbrido (Solar -Bateria) con 2 interruptores. Imagen archivo DGCyE.

Conexión arduino, puente H, sensor ultrasonido y led. Imagen archivo DGCyE.
Los laboratorios virtuales (on line-offline) son un excelente recurso de apoyo que funciona como un potente simulador de sistemas y circuitos de control en el que las y los estudiantes pueden diseñar y probar sus diseños de circuitos eléctricos y electrónicos en algunos casos también microcontroladores logrando una rápida adquisición de resultados sin generar gastos, como tampoco poner en riesgo componentes.
Actividad 13
Programación del circuito electrónico del dragster utilizando Arduino
En la siguiente actividad las y los estudiantes programarán, mediante código, las luces del dragster. A continuación se muestra el código utilizado en la programación a través de Arduino.

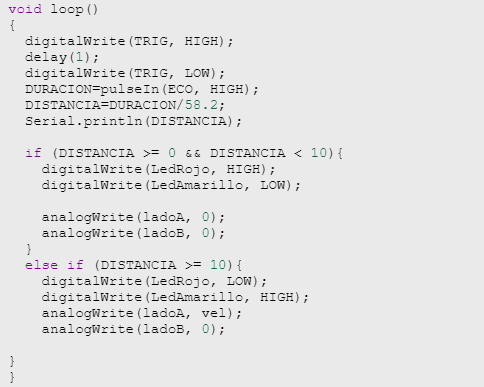
Código programación. Imagen archivo DGCyE.
Etapa de presentación
Actividad 14
Generación de paneles de presentación con el objeto de socializar los proyectos realizados. Se deben mostrar situación de uso, accionamientos, materiales, entre otros.

Imagen archivo DGCyE.
Actividad 15
Puesta en común de los proyectos diseñados en formato protocolo de crítica. Pro y contras de la propuesta final utilizando la herramienta FODA.
En una hoja A4 y utilizando post-it, ir cargando en cada cuadro los aspectos a destacar.
| FORTALEZAS - La estructura del chasis presenta vaciados para alivianar su peso. - Presenta bajo costo de materiales. - El circuito eléctrico es muy sencillo de realizar. - Al tener panel solar no necesita baterías para desplazarse. - En caso de nubosidad se puede utilizar baterías. - El panel solar permite modificar su posición. | OPORTUNIDADES - La transmisión se puede realizar con materiales reutilizados. - Las piezas impresas en 3D se ensamblan fácilmente. - Comprender el funcionamiento del circuito eléctrico. - Comprender el funcionamiento de mecanismos simples y transmisión de movimientos. |
| DEBILIDADES - El conexionado puede desconectarse fácilmente si no se manipula con cuidado. - Los mecanismos deben vincularse adecuadamente para transmitir potencia. - El panel solar es fijo. | AMENAZAS - Presenta gran diversidad de variables a tener en cuenta al pensar el diseño y el montaje de los componentes. - Se necesita paciencia para armar circuitos, montaje, realizar estructura y puesta en marcha. |
Etapa de fabricación del producto/prototipo
Actividad 16
Con el objeto de organizar tareas y tiempos para materializar el proyecto se sugiere utilizar la herramienta “Diagrama de Gantt”, que permite visualizar rápidamente las tareas en función de los encuentros a llevarse a cabo. En este sentido, se presenta a modo de ejemplo cómo podrían desarrollarse las tareas en una clase de dos horas. En función de la articulación de las asignaturas LT-ST-PT, los tiempos podrán reducirse favoreciendo la integración de las y de los estudiantes.

| ETAPA DE FABRICACIÓN PROYECTO: DRAGSTER SOLAR |
||||||
| Tareas | Encuentro 1 | Encuentro 2 | Encuentro 3 | Encuentro 4 | Encuentro 5 | Encuentro 6 |
| Diseño y modelado 3D. | ||||||
| Impresión 3D de componentes y postproducción. | ||||||
| Trazado y corte de material para fabricación de ejes para transmisión. | ||||||
| Ensamble de componentes que conforman la carrocería. | ||||||
| Ensamble de componentes en carrocería (motor, panel solar, engranajes, poleas, correa, ejes y ruedas). | ||||||
| Realización de cableado eléctrico y conexión de componentes. | ||||||
| Puesta en marcha y verificación. | ||||||
Actividad 17
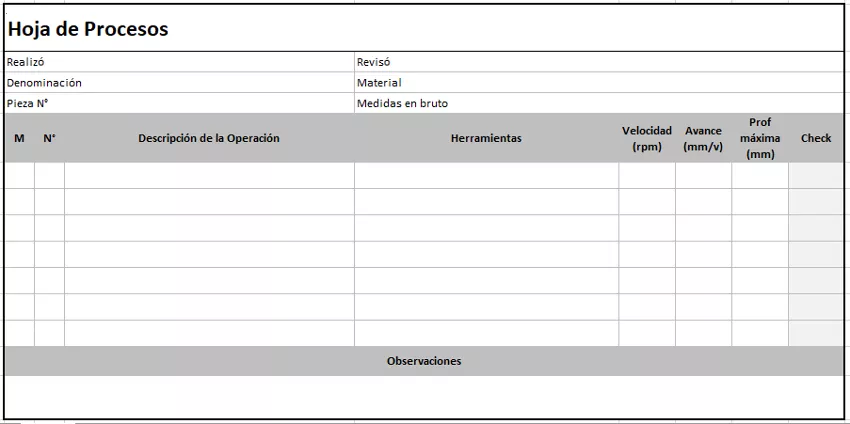
Se recomienda la generación de una “Hoja de proceso” con el objeto de organizar la fabricación de las piezas, la optimización de los espacios y generar autonomía en las y los estudiantes. Esta metodología aporta la información necesaria para llevar a cabo las operaciones en la fabricación.
Actividad 18
Fabricación de dispositivo homologador: se requiere de un instrumento para comprobar las medidas del robot dragster (150 mm x 220 mm). El vehículo no puede exceder estas dimensiones. El robot dragster debe encajar dentro de un espacio específico, ya sea una caja construida con madera de pino, MDF, mediante impresión 3D o utilizando los materiales disponibles en el taller escolar.

Frente dispositivo homologador. Imagen archivo DGCyE.

Lateral dispositivo homologador. Imagen archivo DGCyE.

Perspectiva dispositivo homologador. Imagen archivo DGCyE.

Dispositivo homologador. Imagen archivo DGCyE.

Dispositivo homologador. Imagen archivo DGCyE.
Actividad 19
Pista de carreras: para que los robots dragster puedan desplazarse sin chocar al realizar las competencias, se sugiere realizar una pista de carreras cuyas dimensiones son 690 mm x 4000 mm. La misma cuenta con cuatro carriles separados por un listón de madera de 10 mm de espesor. La pista puede ser construida con madera de pino, MDF, aglomerado, terciado o utilizando los materiales disponibles en el taller escolar.


Pista de carreras - Imagen cedida por el profesor PAULO VILLALBA - E.E.S.T 4 - Garín.
Actividad 20
Fabricación de semáforo
En esta actividad las y los estudiantes realizarán el diseño 3D de un semáforo, utilizando software paramétrico y la fabricación por medio de la impresora 3D. A continuación, se presenta el despiece.


Despiece semáforo. Imágenes archivo DGCyE.


Semáforo modelado 3D. Imágenes archivo DGCyE.
Actividad 21
Circuito electrónico del semáforo utilizando Arduino
Mediante la utilización de Arduino, las y los estudiantes serán capaces de diseñar y personalizar el semáforo de largada según las necesidades específicas (controlar el tiempo de cada fase del semáforo, cantidad de luces, etc).
Tabla de voltajes de funcionamiento más comunes de los LED RGB
| Color | Voltaje |
| Rojo (R) | 1,8V – 2,2V |
| Verde (G) | 2,7V – 3,3V |
| Azul (B) | 3V – 3,6V |
Secuencia de realización del circuito utilizando Tinkercad
1. Configuración y selección de componentes
Al acceder al laboratorio virtual sobre el margen derecho se tiene la posibilidad de seleccionar los componentes necesarios para la simulación del circuito electrónico. En este contexto, seleccionaremos una placa programable (Arduino UNO), una placa de pruebas que permitirá incorporar nueve ledes RGB, dos pulsadores y nueve resistencias que suministrarán el voltaje adecuado a cada LED.
Los led RGB (Red, Green, Blue) integran en un solo dispositivo tres led de los siguientes colores: rojo (red), verde (green) y azul (blue). Para obtener todos los colores de este led es necesario utilizar PWM de Arduino, el color a mostrar dependerá del duty cycle que se asigne a cada canal.

Tinkercad - Circuito semáforo. Imagen archivo DGCyE.
2. Conexión de componentes
Una vez incorporados todos los componentes en la placa de pruebas se realizará su conexión. Se utilizarán cables de distintos colores para facilitar la comprensión del circuito. Se utilizan dos pulsadores: uno inicia la secuencia de luces y el otro actúa como reset. En la imagen se puede observar la primera fila de ledes encendidos de color rojo. En forma secuencial se encenderán las siguientes filas de color rojo cada 5 segundos.

Tinkercad - Circuito semáforo. Imagen archivo DGCyE.
3. Inicio y secuencia de luces
De esta forma, las y los participantes van a estar en aviso 15 segundos antes del momento de la largada. Una vez listas y listos, una o un estudiante activa el pulsador encendiendo la primera fila de led dando inicio a la secuencia; pasados 5 segundos encenderá la tercera, y así sucesivamente al llegar a la última. Luego de 5 segundos todos los led pasarán a color verde habilitando a quienes compiten a encender el dragster.

Tinkercad - Circuito semáforo. Imagen archivo DGCyE.
4. Gestión de incidentes
En el caso de que durante la secuencia algún robot presente un desperfecto, se deberá presionar el botón reset.

Tinkercad - Circuito semáforo. Imagen archivo DGCyE.
5. Finalización y autorización
Finalmente, todos los led pasarán a color verde habilitando a quienes participan de la competencia a encender el dragster. En este momento los vehículos quedan habilitados para iniciar su participación.
Este proceso proporciona una secuencia ordenada y precisa para la señalización luminosa, facilitando la comprensión y el desarrollo de la actividad por parte de las y de los estudiantes.

Tinkercad - Circuito semáforo. Imagen archivo DGCyE.
Actividad 22
Programación del circuito electrónico del semáforo utilizando Arduino
En la siguiente actividad, las y los estudiantes programarán mediante código las luces del semáforo. A continuación se muestra el paso a paso para generar el código utilizado en la programación.
1- Iniciar todos los pines de entrada y salida de la placa programable.
void setup()
{
pinMode(5, INPUT);
pinMode(13, OUTPUT);
pinMode(12, OUTPUT);
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(4, INPUT);
}
void loop()
{
if (digitalRead(5) > 0) {
digitalWrite(13, LOW);
digitalWrite(12, LOW);
digitalWrite(11, LOW);
digitalWrite(10, LOW);
digitalWrite(13, HIGH);
2- Encender la primera fila de led rojos
delay(5000); // Wait for 5000 millisecond(s)
digitalWrite(12, HIGH);
3- Encender la segunda fila de led rojos
delay(5000); // Wait for 5000 millisecond(s)
digitalWrite(11, HIGH);
4- Encender la tercera fila de led rojos
delay(5000); // Wait for 5000 millisecond(s)
digitalWrite(10, HIGH);
5- Encender la cuarta fila de led rojos
delay(5000); // Wait for 5000 millisecond(s)
6- Apagar las cuatro filas de led rojos
digitalWrite(13, LOW);
digitalWrite(12, LOW);
digitalWrite(11, LOW);
digitalWrite(10, LOW);
delay(5000); // Wait for 5000 millisecond(s)
7- Encender las cuatro filas de led verdes
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
delay(50000); // Wait for 50000 millisecond(s)
} else {
if (digitalRead(4) > 1) {
digitalWrite(11, LOW);
digitalWrite(10, LOW);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(8, HIGH);
digitalWrite(7, HIGH);
digitalWrite(6, HIGH);
}
}
}

Tinkercad - Circuito y código semáforo. Imagen archivo DGCyE.
Actividad 23
Realización de lista de materiales del semáforo




| N° | Designación/Nombre | Función | Características técnicas | Adquisición |
| 1 | Arduino Nano 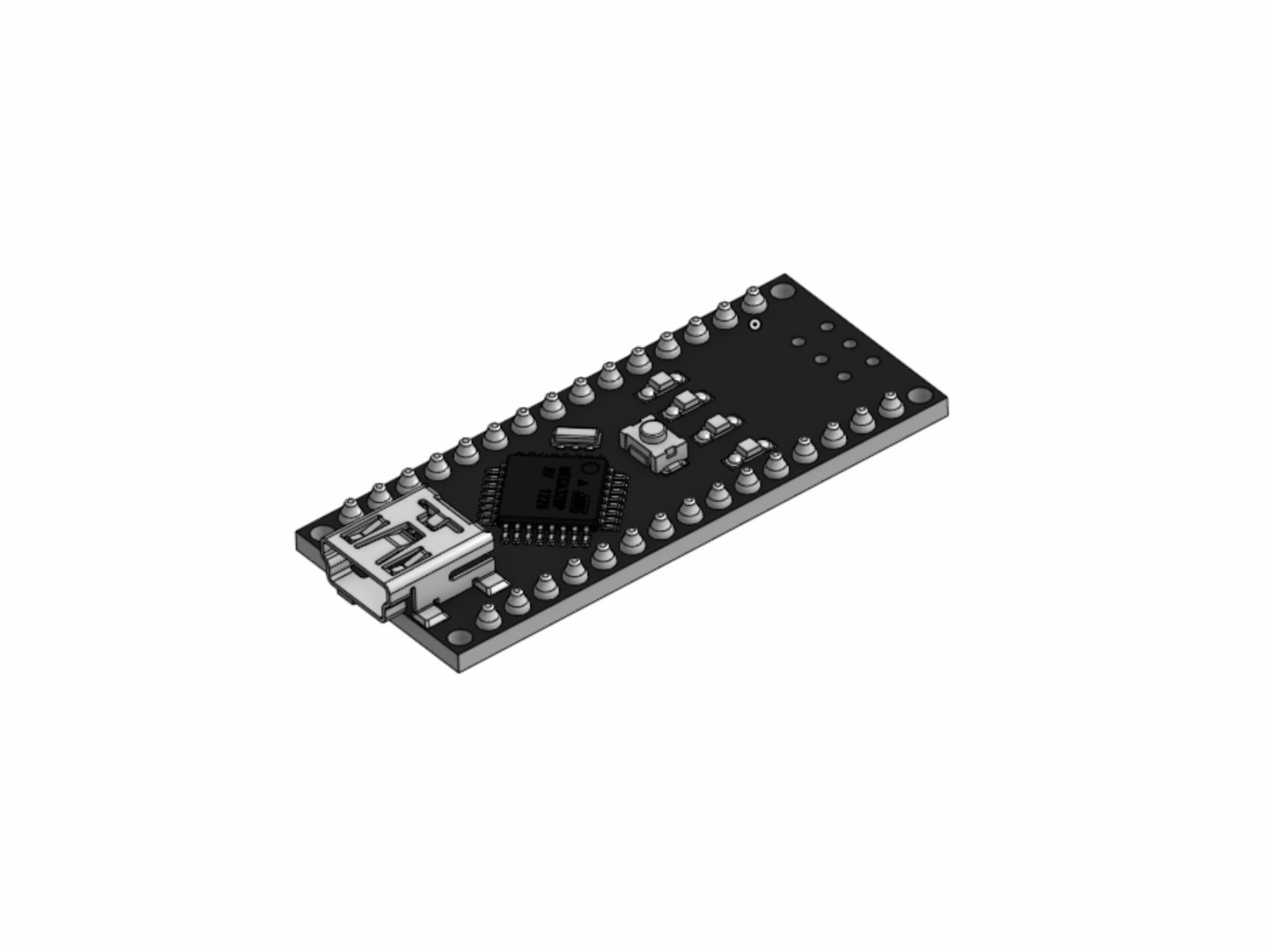 | El Arduino es una placa basada en un microcontrolador ATMEL. Los microcontroladores son circuitos integrados en los que se pueden grabar instrucciones, las cuales las escribes con el lenguaje de programación que puedes utilizar en el entorno Arduino IDE. Estas instrucciones permiten crear programas que interactúan con los circuitos de la placa. El microcontrolador de Arduino posee lo que se llama una interfaz de entrada, que es una conexión en la que podemos conectar en la placa diferentes tipos de periféricos. La información de estos periféricos que conectes se trasladará al microcontrolador, el cual se encargará de procesar los datos que le lleguen a través de ellos. | Microcontrolador: ATMega328P. Velocidad de reloj: 16 MHz. Voltaje de trabajo: 5V. Voltaje de entrada: 7,5 a 12 voltios. Pinout: 14 pines digitales (6 PWM) y 8 pines analógicos. 1 puerto serie por hardware. Memoria: 32KB Flash (2KB para bootloader), 2KB RAM y 1KB Eeprom | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 2 | Portapilas/baterías -18650-s | Compartimento que se utiliza para alojar una o más baterías en un equipo de forma segura. El soporte tiene contactos planos de metal o resortes que presionan contra los terminales de la batería y provocan un contacto eléctrico. | Voltaje de funcionamiento: 3.7V Voltaje mínimo de entrada recomendado - Voltaje máximo de entrada recomendado: 3.7V - 3.7V Voltaje mínimo de entrada límite - Voltaje máximo de entrada límite: 3.7V - 3.7V | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 3 | Baterías: Celda 18650 3.7v Li-ion Recargable | La batería es un acumulador y proporciona la energía eléctrica. Generalmente, cuando vamos a elegir una batería nos fijamos principalmente en tres características: capacidad, voltaje y espacio. | Pila/batería Celda 18650 Capacidad de la batería: 2500 mAh Voltaje nominal: 3.7V - Recargable Composición: Ion Litio | Tiendas de venta on line. Ferreterías. Casas de electricidad. |
| 4 | Ledes RGB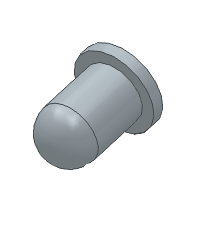 | El LED RGB es un tipo especial de diodo LED que se compone por varias matrices ledes simples como las que se encuentran en otros LEDs monocolor. De esa forma, pueden emitir en estos tres colores primarios, generando así todo tipo de efectos y colores diferentes (incluso el blanco combinando el rojo, verde y azul a la vez) tan solo controlando una de las patillas de estos componentes. Los 3 diodos LED empaquetados en un mismo encapsulado es capaz de producir toda esta gama de colores. Tiene un pinout algo diferente a los LED convencionales, ya que incluyen 3 pines, uno por cada color (cátodos o +) y otro más adicional común a todos, el ánodo (-) | Voltaje de Operación: R:1.8-2.2V/G:3.0-3.4V/B:3.0-3.4V Corriente máx: 20 mA Intensidad luminosa máx.: (R:800, G:4000, B:900) mcd Tipo: cátodo común – ultrabrillante Ángulo de visión: 60º Diámetro: 5mm Espaciado de pines: 1 mm Temperatura de trabajo: -40ºC hasta 70ºC | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 5 | Resistencias | La resistencia es un componente imprescindible en un circuito eléctrico. Está fabricada por carbón u otros materiales resistentes a la electricidad que actúan como obstáculo cuando pasa la corriente eléctrica. Es decir, se opone al paso de la corriente para que el sistema eléctrico no sufra sobrecargas. Cada resistencia tiene una corriente máxima que puede soportar. Su potencia máxima dependerá del material de su cuerpo y sus propiedades. La magnitud de cada resistencia debe estar escrita por lo que se puede observar de manera visual en su cuerpo. | Las resistencias normalizadas que tendremos que usar son las siguientes: RR = 140 Ω –> 150 Ω RG = 90 Ω –> 100 Ω RB = 90 Ω –> 100 Ω | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 6 | Interruptor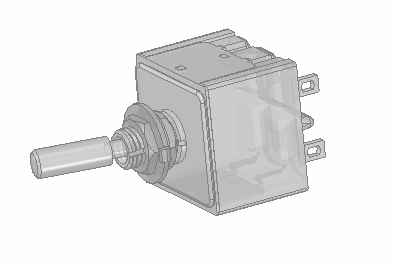 | Los interruptores son un elemento básico en la instalación eléctrica de cualquier vivienda, edificio, negocio, oficina e industria. Estos dispositivos se encargan de desviar o interrumpir la conexión eléctrica, ya sea para una función tan simple como el apagado/encendido | Clasificación: DC 50V,0.5A Resistencia de contacto: 30 MΩ máx. Resistencia de aislamiento: 100m Ω Min,a DC 500V Voltaje soportado: CA 500V durante 1 min. Vida útil: 10.000 ciclos (15-18 ciclos/minuto, descarga | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 7 | Cables Dupont | Un cable es por definición el conjunto de uno o más conductores eléctricos aislados, generalmente de cobre o aluminio, que transportan corriente eléctrica entre al menos dos componentes. En electrónica, se usan multitud de cables distintos, y a diferencia de los usados en el ámbito eléctrico, son normalmente mucho más finos, su diámetro es menor. | Los cables Dupont típicos para conexiones en la Protoboard son AWG26, por lo que tienen una sección de 0,13 mm2. Normalmente deberíamos usar uno de un diámetro de mínimo 0,5 mm, que suele ser el grosor de los terminales de los componentes más habituales que usaremos. | Tiendas de venta on line. Ferreterías. Casas de electricidad y electrónica. |
| 10 | Cuerpo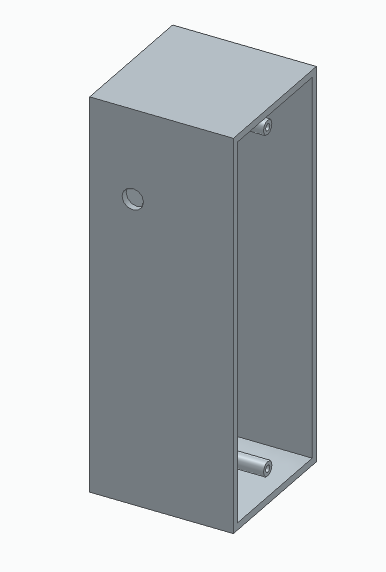 | Alojar los componentes que posibilitan generar el funcionamiento del semáforo. | Material: ABS-PLA | Fabricación mediante impresora 3D. |
| 11 | Tapa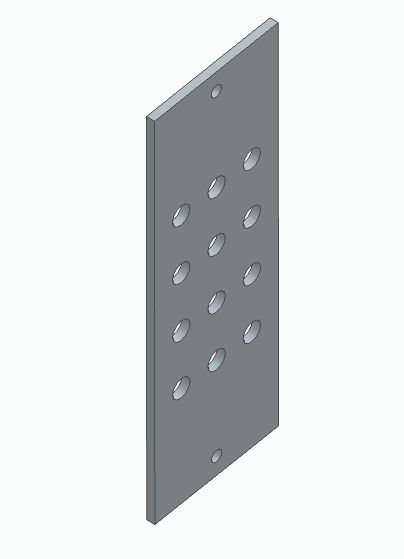 | Alojar los ledes del semáforo y cerrar el cubículo que forma el cuerpo principal del semáforo. | Material: ABS-PLA | Fabricación mediante impresora 3D. |
| 12 | Estructura 1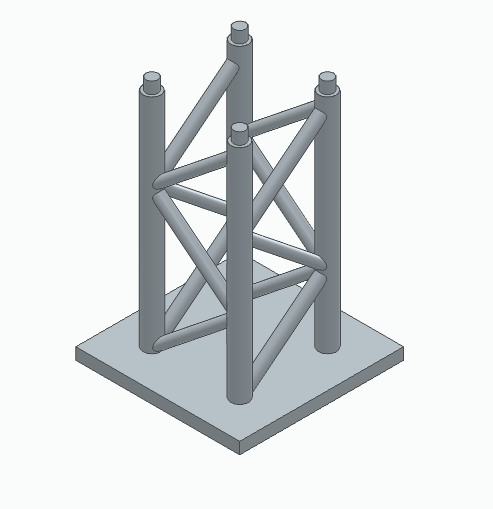 | Estructura inferior del semáforo. La base posee un diseño reticular y encastres en las columnas para poder vincularse con la parte superior (estructura 2). | Material: ABS-PLA | Fabricación mediante impresora 3D. |
| 13 | Estructura 2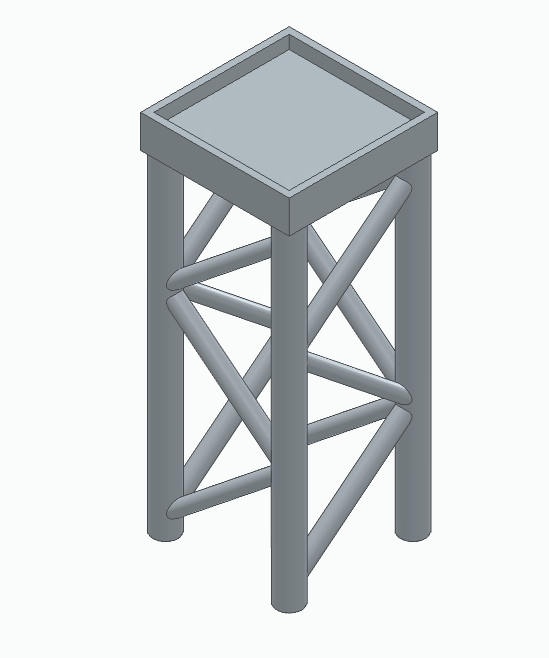 | Estructura inferior del semáforo. Posee un diseño reticular y encastres en las columnas para poder vincularse con la con la base (estructura 1). | Material: ABS-PLA | Fabricación mediante impresora 3D. |
Actividad 25
Croquis de piezas que componen el semáforo
Desarrollo de croquis aplicando técnicas de rebatimiento y acotación para poder comunicar el proceso productivo de cada pieza o componente.


Base. Imagen archivo DGCyE.

Tapa. Imagen archivo DGCyE.

Cuerpo. Imagen archivo DGCyE.

Estructura 1. Imagen archivo DGCyE.

Estructura 2. Imagen archivo DGCyE.





Imágenes archivo DGCyE.
Etapa para la evaluación del proceso realizado
En esta instancia se sugiere utilizar el método de evaluación por rúbricas, y revisar los conceptos más importantes en el documento Guía metodológica general “(ver material complementario)”.
Actividad 24
Evaluación con el conjunto de las y los estudiantes sobre el proceso que realizaron, aprendizajes logrados, cuestiones a mejorar. Se utilizarán las rúbricas indicadas en el documento Guía metodológica general “(ver material complementario)”.
1 Comunicación 3/2021 “Acerca de las pautas a considerar en el ciclado extendido 2020-2021 en los campos de la FCT y FTE del ciclo básico anexo correspondiente a la modalidad de Educación Técnica”.
2 Post-it (o pósit) son unas pequeñas hojas de papel autoadhesivo de varias dimensiones, formas y colores que suelen llevar el pegamento solo en un extremo, las cuales son ideales para dejar notas a otras personas o para comunicar algo importante.
Imagen de portada: Archivo DGCyE.